






工業機器人作業系統
面對用戶多品種、中小批量生產等越來越高的要求,機器人作業系統由于其高效性和柔性得到了廣泛應用和發展。然而,工業機器人雖然具備固有的智能性和靈活性,但是傳統系統集成方法卻制約了工業機器人性能的發揮。機器人作業系統可以高效地進行特定作業對象的加工,但當作業對象發生改變時,作業系統也將會涉及一系列改變,而這些改變由于集成方法的局限變得十分復雜耗時,成為制約機器人柔性優勢的一個瓶頸。如何突破這個瓶頸,充分發揮工業機器人的優勢,成為企業競爭優勢的一個重要增長點。
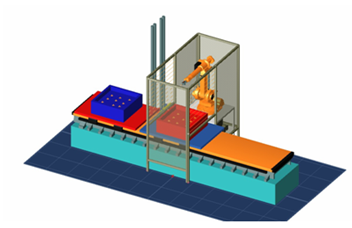
- 產品概要
- 技術參數
- 應用范圍
-
面對用戶多品種、中小批量生產等越來越高的要求,機器人作業系統由于其高效性和柔性得到了廣泛應用和發展。然而,工業機器人雖然具備固有的智能性和靈活性,但是傳統系統集成方法卻制約了工業機器人性能的發揮。機器人作業系統可以高效地進行特定作業對象的加工,但當作業對象發生改變時,作業系統也將會涉及一系列改變,而這些改變由于集成方法的局限變得十分復雜耗時,成為制約機器人柔性優勢的一個瓶頸。如何突破這個瓶頸,充分發揮工業機器人的優勢,成為企業競爭優勢的一個重要增長點。

-
機器人作業系統本質上也是機電集成系統,因此可以利用機電集成系統的相關概念和技術方法來解決工業機器人集成系統領域的問題。不論它如何發展,其主要內涵是高柔性、低成本、快速響應市場變化。工業機器人機電集成系統是為了適應快速多變的市場環境發展而提出的新一代集成系統,它兼具專用集成系統和柔性集成系統。
-
廣泛應用于自動化生產領域。


